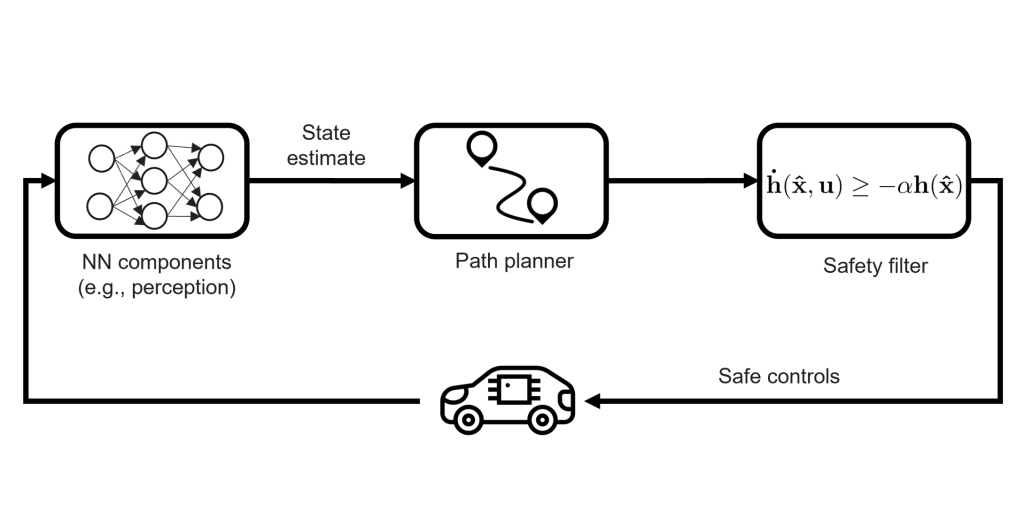
The UW Autonomous & Resilient Controls Laboratory (ARC Lab) focuses on developing principled analysis and control methodologies to enable safe and trustworthy autonomous intelligent systems. The lab’s current research thrusts include verification and control of machine learning-enabled systems; safety filter design; optimization-based motion planning; and certifiable perception-based control.


News
- 03/2026: Yujie successfully defended his PhD dissertation “Safety-Critical Control of Uncertain Nonlinear Systems via Control Barrier Functions”. Congratulations!
- 01/2026: Yuhao successfully defended his PhD dissertation “Formal Reachability and Robust Stability Analysis of Neural Network Control Systems”. Congratulations!
- 08/2025: Prof. Xiangru Xu is appointed as Associate Editor of the IEEE Transactions on Automatic Control.
- 11/2024: ARC Lab researcher Abigail Winn was awarded the Faustin-Prinz Undergraduate Research Fellowship. News from COE.
- 05/2024: Yanze Liu successfully defended his MS thesis “Contract-based Multi-rate Control Design”.
- 09/2023: Hang Zhang successfully passed his PhD Qualifying Examination.
- 08/2023: Sequoyah Walters successfully defended his MS thesis “Vision-based Autonomous Landing of a Quadcopter with Field-of-view Constraints”.
- 04/2023: ARC Lab received the Honorable Mention Award in the research group category in Engineering Expo 2023.
- 02/2023: Prof. Xiangru Xu received National Science Foundation CAREER Award “Towards Hierarchical and Provably Safe Control for Learning-Enabled Autonomous Systems”. News from COE.
- 09/2022: Yujie Wang successfully passed his PhD Qualifying Examination.
- 09/2022: ARC Lab received a National Science Foundation grant “The Future of Trucking: Pathways to Positive Societal Outcomes”. News from COE.
- 07/2022: ARC Lab received a National Science Foundation grant “Simulating Autonomous Agents and the Human-Autonomous Agent Interaction”. News from COE.
- 05/2022: Victor Freire successfully defended his MS thesis “FlatVCP: Safe & Efficient Optimal Control of Flat Systems Based on B-Spline Optimization”.
- 05/2022: ARC Lab researcher William Dong was awarded Hilldale Undergraduate/Faculty Fellowship. The project is about building and controlling a modular aerial-terrestrial autonomous robot. News from ME.
- 09/2021: Yuhao Zhang successfully passed his PhD Qualifying Examination.
- 04/2021: UW is selected as one of the ten teams to participate in the SAE AutoDrive Challenge II Competition. We are excited to design and integrate our own autonomous vehicle system, based on a Chevrolet Bolt EUV vehicle, into a fully autonomous vehicle over the next four years. Dr. Glenn Bower and Prof. Xiangru Xu will be the faculty advisors of the Wisconsin Team. News from ME and news from SAE.
- 09/2019: Our paper “Correctness Guarantees for the Composition of Lane Keeping and Adaptive Cruise Control” received the IEEE Transactions on Automation Science and Engineering Best New Application Paper Award from IEEE Robotics & Automation Society. News from ME.